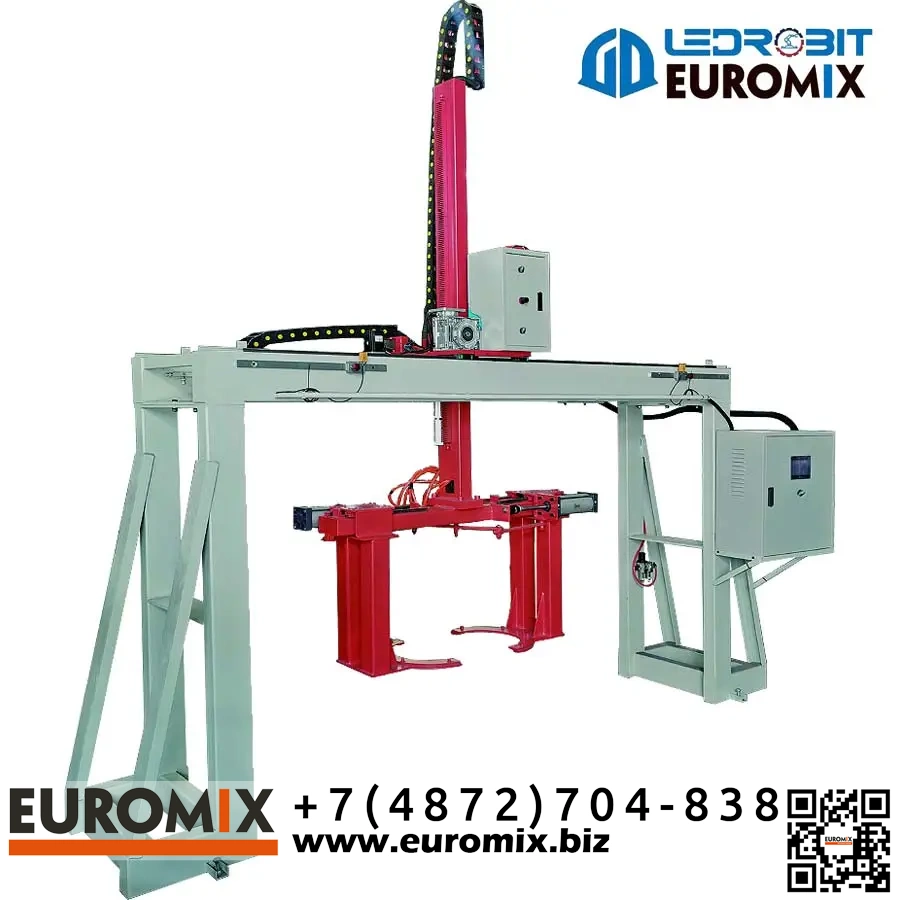
SM LD4000 - это портальный робот манипулятор для автоматизации операций захвата, подъема, перемещения, точного позиционирования и укладки изделий в штабель на производственных линиях. Оборудование рассчитано на работу в составе автоматизированного участка, где требуется стабильная подача и съем продукции в заданном темпе, повторяемость укладки по рядам и слоям, снижение доли ручного труда и уменьшение влияния человеческого фактора. Типовая задача для этой модели это штабелирование как панельных изделий, так и изделий сложной формы, когда важны точная укладка, аккуратное формирование пакета и возможность быстро менять схему раскладки под текущую номенклатуру.
Конструктивно SM LD4000 выполнен как портальная система с несущей рамой и перемещающимся рабочим модулем. Такая архитектура удобна для штабелирования, потому что обеспечивает предсказуемую геометрию перемещений, устойчивость при работе в повторяемых циклах и удобную интеграцию с рольгангами, конвейерами, накопителями, паллетными постами и столами позиционирования. Портальная компоновка позволяет обслуживать зону подачи и зону укладки в пределах рабочего перемещения, а также формировать ряд и слой с повторяемым шагом укладки.
Для производственного участка практическая ценность SM LD4000 заключается в повышении стабильности потока и снижении затрат на тяжелые и монотонные операции. Автоматическая укладка уменьшает вероятность сколов и ударных повреждений, снижает разброс по геометрии штабеля, упрощает дальнейшую упаковку и транспортировку. За счет возможности оперативной переналадки схемы укладки робот подходит для предприятий, где меняются форматы изделий и требуется быстро переключаться между разными рисунками штабелирования.
При проектировании роботизированной ячейки важно учитывать динамические нагрузки, возникающие при разгоне и торможении, а также влияние вылета рабочего органа и высоты слоя. Для ресурсной работы рекомендуется закладывать технологический запас по грузоподъемности относительно фактической массы изделия и выбирать режимы движения, которые сохраняют ресурс механики и приводов при многосменной эксплуатации.
Принцип работы
- Подача изделия в зону обслуживания. Изделие поступает в зону подбора по конвейеру или рольгангу, либо размещается на столе позиционирования. Система управления получает сигнал готовности линии и разрешение на цикл, после чего робот переводится в точку захвата.
- Захват и фиксация. Рабочий орган подводится к изделию и выполняет фиксацию. Тип захвата выбирается под геометрию изделия и требования к сохранности поверхности, для панельной продукции часто применяются вакуумные решения, для фигурных изделий применяются механические захваты. После подтверждения фиксации система разрешает подъем.
- Подъем и перенос. Робот выполняет подъем на заданную высоту и перенос изделия по порталу в зону укладки. Скорости и ускорения задаются так, чтобы исключить ударные нагрузки, вибрации и смещение изделия в захвате, особенно при укладке на высоту слоя.
- Позиционирование и укладка. Изделие подводится к целевой точке, выполняется точная привязка по месту, затем осуществляется плавная укладка в ряд и слой. После укладки захват освобождает изделие, рабочий модуль отводится, цикл повторяется до формирования полного штабеля или паллеты.
Преимущества
- Производительность и стабильность участка. Автоматический цикл укладки стабилизирует темп штабелирования, уменьшает простои, снижает влияние человеческого фактора и повышает повторяемость укладки по рядам и слоям. Это особенно важно на участках упаковки, складирования и отгрузки, где геометрия штабеля влияет на логистику и безопасность транспортировки.
- Гибкость под разные типы изделий. Робот ориентирован на работу как с панельными изделиями, так и с фигурной продукцией. Переналадка схемы укладки выполняется программно и через настройку рабочего органа, что позволяет быстро адаптировать участок под новую номенклатуру.
- Снижение повреждаемости продукции. Контролируемая траектория движения и точная укладка уменьшают риск сколов и ударных повреждений, повышают качество формирования пакета и улучшают повторяемость геометрии штабеля.
- Удобная интеграция в линию. Портальная архитектура упрощает встраивание в производственный поток с конвейерами и рольгангами, позволяет организовать прямую логистику подачи и укладки без лишних промежуточных перегрузок.
Область применения
- Вибропрессование и производство бетонных изделий. Укладка панельных и фасонных изделий в штабель, формирование паллет и пакетов, подготовка к упаковке и отгрузке на финишных операциях линии.
- Производство плитных и панельных материалов. Автоматизированная укладка панелей и плит на поддоны, в накопители и на складские позиции, где важны повторяемость укладки и стабильный темп потока.
- Участки упаковки и складской логистики. Штабелирование и паллетирование продукции перед обвязкой, термоусадкой, маркировкой и складированием, когда требуется одинаковая геометрия штабеля и снижение ручных операций.
| Габаритные размеры (Д×Ш×В) | 4000×700×3800 мм |
| Максимальнный подъем | 1000 мм |
| Максимальное перемещение | 3000 мм |
| Максимальная нагрузка | 300 кг |
| Масса | 900 кг |
| Максимальный размер загрузки и выгрузки | 550×500×500 мм |
| Минимальный размер загрузки и выгрузки | 350×350×500 мм |
| Скорость | 30 шт. |
| Мощность | 4 кВт |